车联网是汽车、电子、计算机、通信等多技术领域深度融合的新型产业,自“十二五”以来蓬勃发展。展望未来,车联网是由单车智能迈入网联自动驾驶时代的重要基础设施。
车联网产业链的参与主体大致有TSP、整车厂商、电信运营商、硬件终端、平台等各个参与主体,其在车联网各主要领域的主导能力、商业模式均有不同。
从2021年春节车联网反垄断第一枪打响,到这一年来血洗互联网行业的反垄断调查以及滴滴被封,随之而来的数据安全、信息安全的阴云,在车联网行业的“大蛋糕”下,面临的种种挑战一触即发。
不同于互联网崛起时的时代背景,拥有更高起点的智能网联汽车,能不能完美躲过那些在互联网时代被踩过的坑?正逐渐互联网化的车联网,还有明天吗?
什么是车联网
车联网是依托新一代信息通信手段实现车内、车与人、车与车、车与路、车与服务平台全方位网络连接和信息交互的新技术。车联网致力于提升汽车的智能化和网联化水平,构建智能交通的服务新业态,提升交通整体通行效率,为用户提供智能、安全、节能、高效、舒适的综合驾乘体验。
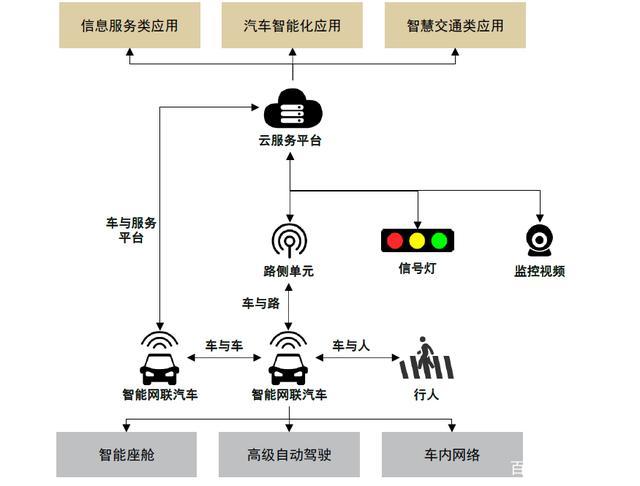
车联网主要包含“人、车、路、通信、服务平台”五大关键要素:
“人”是车联网服务的使用者和道路环境的参与者“车”是车联网最核心的要素,智能网联汽车为车联网技术落地应用“路”是车联网应用的必备配套基础设施,主要目标为实现交通道路信息化“通信”即各类信息的交互载体,汇总传输车内、车路、车云的海量信息流“服务平台”是车联网服务生态的业务数据载体,致力于改善用户驾乘感受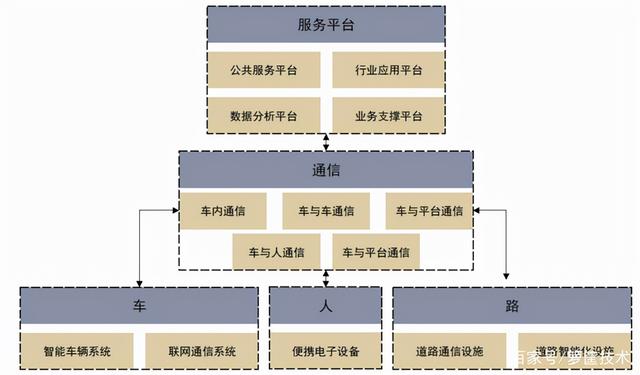
车联网能做什么
车联网技术是实现L4/L5自动驾驶的必要条件:
依靠单车智能技术路线难以解决L4/L5自动驾驶的某些特殊场景比如行人“鬼探头”、前方交通事故预知等,基于车联网技术的“上帝视角”则可较好处理部分场景仅依靠单车智能虽能较好解决,但仍存在长尾效应视觉识别红绿灯,由于存在遮挡、强光、极端天气等因素,无法做到100%准确,而结合车联网的车路协同技术则有望解决此类问题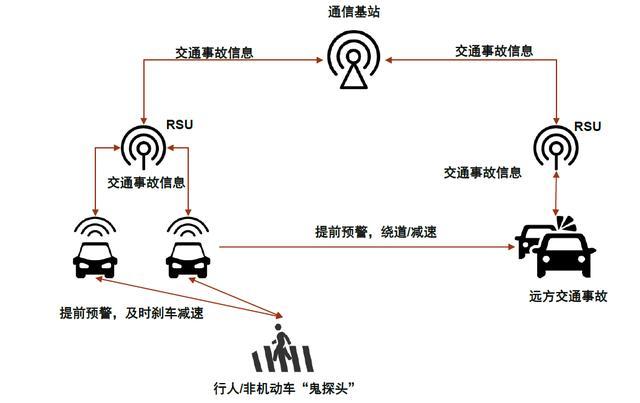
车联网技术有效降低高级自动驾驶的车端成本压力
高级别自动驾驶汽车若仅依赖于单车智能,则必须进行包括激光雷达、摄像机、毫米波雷达等多传感器感知信息的融合,并对决策控制算法精度提出了非常高的要求。其高昂的硬件和软件成本将导致高级别自动驾驶汽车难以大规模民用化,而采用车联网技术则可有效降低激光雷达规格和高精度地图采集成本等,大大缓解了车端的成本压力。

车路协同自动驾驶通过信息交互可显著拓展单车感知范围,突破单车技术限制,实现群体智能。通过道路感知设备采集环境信息,并按照协议实现V2V/V2R/V2P/V2N的网络互联化,可有效分担车载自动驾驶系统的感知、决策和控制压力,降低系统复杂程度。
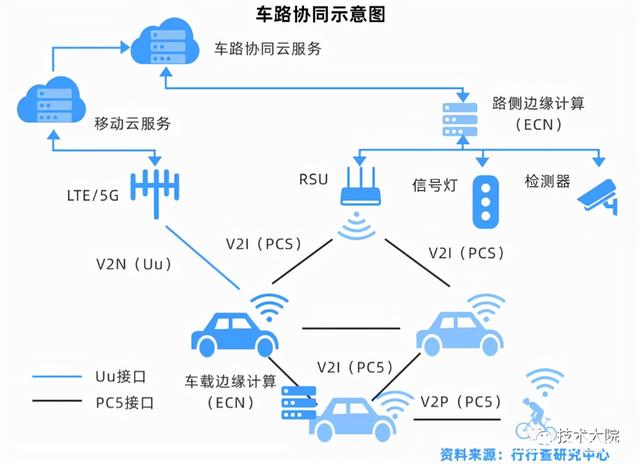
伴随自动驾驶研发投入逐步提升,投入产出比呈边际效益递减的趋势,车路协同自动驾驶可使单车自动驾驶的个体智能向协同智能过渡,快速提升自动驾驶水平,并加快规模商业化落地临界点的到来。车路协同自动驾驶主要可分为三个发展阶段:
信息交互协同:车载OBU和路侧RSU进行直连通信,实现车路信息共享与交互协同感知:建设多样的道路感知设施,全面覆盖主要行驶区域,可实现车辆与道路设施的协同检测与识别,可服务于L4自动驾驶车辆协同决策控制:道路具备协同决策控制能力,可实现道路对车辆、交通的决策控制,时刻保障自动驾驶安全
车路协同自动驾驶发展阶段
高精度地图是L3+自动驾驶系统不可或缺的重要支撑技术,车联网技术确保高精度地图数据高效传输:
对于L3级自动驾驶,传统的静态地图已不再适用,需要静态与动态交通信息结合的高精度地图数据,需求数据精度也提升至20-50cmL4级自动驾驶则需要精度更高的激光点云辅助分析,可将数据精度提升至10-30cmL5级完全自动驾驶,需多传感器融合高精度地图来实现对静态地图和动态事件的统一
由于包含道路、车道、对象模型的高精度地图需要更精准的方位、姿态以及高频率的更新,地图相关数据的实时传输量偏大。基于NR-V2X的车联网技术可以保证高精度地图在车载场景下能安全稳定的进行交互应用。
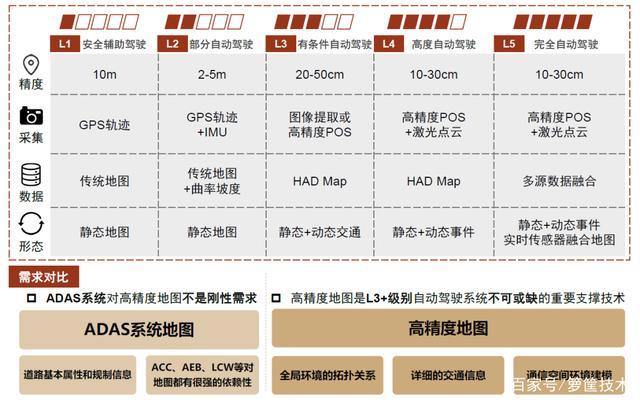
不同级别自动驾驶对于高精度地图的需求
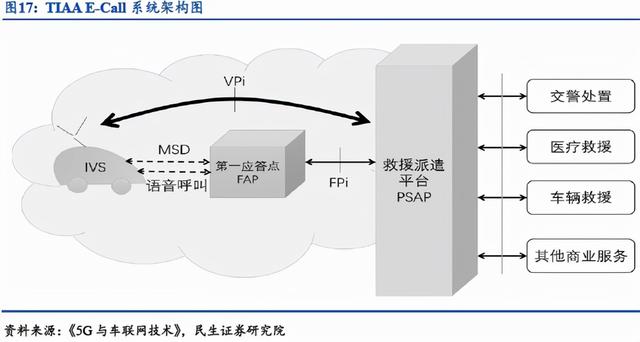
紧急救援:车辆发生紧急情况车主按下车辆上安装的紧急按钮将紧急信号以及车辆位置等信息等通知客服中心,客服中心实现精准救援的同时还可以将车辆事故信息通知给其他车辆,方便周围车辆做出紧急避险反应或重新规划合适的行车路线。
转载自网络,文中观点仅供分享交流,不代表本号立场,如涉及版权等问题,请您告知,我们将及时处理。
本文来自管理投稿,不代表胡巴网立场,如若转载,请注明出处:https://www.hu85.com/150201.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 xxxxx@qq.com 举报,一经查实,本站将立刻删除。